Механические колебания. Основные формулы раздела «колебания и волны Угловая амплитуда колебаний формула
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
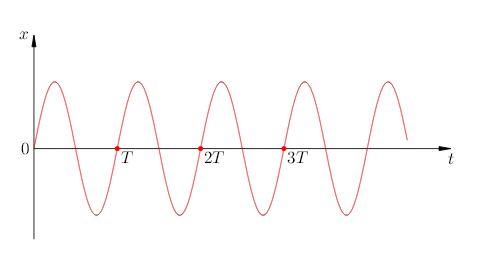
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Колебательным называется любое периодически повторяющееся движение. Поэтому зависимости координаты и скорости тела от времени при колебаниях описываются периодическими функциями времени. В школьном курсе физики рассматриваются такие колебания, в которых зависимости и скорости тела представляют собой тригонометрические функции ![]() ,
, ![]() или их комбинацию, где - некоторое число. Такие колебания на-зываются гармоническими (функции
или их комбинацию, где - некоторое число. Такие колебания на-зываются гармоническими (функции ![]() и
и ![]() часто называют гармоническими функциями). Для решения задач на колебания, входящих в программу единого государственного экзамена по физике, нужно знать определения основных характеристик колебательного движения: амплитуды, периода, частоты, круговой (или циклической) частоты и фазы колебаний. Дадим эти определения и свяжем перечисленные величины с параметрами зависимости координаты тела от времени , которая в случае гармонических колебаний всегда может быть представлена в виде
часто называют гармоническими функциями). Для решения задач на колебания, входящих в программу единого государственного экзамена по физике, нужно знать определения основных характеристик колебательного движения: амплитуды, периода, частоты, круговой (или циклической) частоты и фазы колебаний. Дадим эти определения и свяжем перечисленные величины с параметрами зависимости координаты тела от времени , которая в случае гармонических колебаний всегда может быть представлена в виде
где , и - некоторые числа.
Амплитудой колебаний называется максимальное отклонение колеблющегося тела от положения равновесия. Поскольку максимальное и минимальное значение косинуса в (11.1) равно ±1, то амплитуда колебаний тела, совершающего колебания (11.1), равна величине . Период колебаний - это минимальное время, через которое движение тела повторяется. Для зависимости (11.1) период можно установить из следующих соображений. Косинус - периодическая функция с периодом . Поэтому движение полностью повторяется через такое значение , что . Отсюда получаем
Круговой (или циклической) частотой колебаний называется число колебаний, совершаемых за единиц времени. Из формулы (11.3) заключаем, что круговой частотой является величина из формулы (11.1).
Фазой колебаний называется аргумент тригонометрической функции, описывающей зависимость координаты от времени. Из формулы (11.1) видим, что фаза колебаний тела, движение которого описывается зависимостью (11.1), равна  . Значение фазы колебаний в момент времени = 0 называется начальной фазой. Для зависимости (11.1) начальная фаза колебаний равна величине . Очевидно, начальная фаза колебаний зависит от выбора начала отсчета времени (момента = 0), которое всегда является условным. Изменением начала отсчета времени начальная фаза колебаний всегда может быть «сделана» равной нулю, а синус в формуле (11.1) «превращен» в косинус или наоборот.
. Значение фазы колебаний в момент времени = 0 называется начальной фазой. Для зависимости (11.1) начальная фаза колебаний равна величине . Очевидно, начальная фаза колебаний зависит от выбора начала отсчета времени (момента = 0), которое всегда является условным. Изменением начала отсчета времени начальная фаза колебаний всегда может быть «сделана» равной нулю, а синус в формуле (11.1) «превращен» в косинус или наоборот.
 В программу единого государственного экзамена входит также знание формул для частоты колебаний пружинного и математического маятников. Пружинным маятником принято называть тело, которое может совершать колебания на гладкой горизонтальной поверхности под действием пружины, второй конец которой закреплен (левый рисунок). Математическим маятником называется массивное тело, размерами которого можно пренебречь, совершающее колебания на длинной, невесомой и нерастяжимой нити (правый рисунок). Название этой системы – «математический маятник» связано с тем, что она представляет собой абстрактную математическую
модель реального (физического
) маятника. Необходимо помнить формулы для периода (или частоты) колебаний пружинного и математического маятников. Для пружинного маятника
В программу единого государственного экзамена входит также знание формул для частоты колебаний пружинного и математического маятников. Пружинным маятником принято называть тело, которое может совершать колебания на гладкой горизонтальной поверхности под действием пружины, второй конец которой закреплен (левый рисунок). Математическим маятником называется массивное тело, размерами которого можно пренебречь, совершающее колебания на длинной, невесомой и нерастяжимой нити (правый рисунок). Название этой системы – «математический маятник» связано с тем, что она представляет собой абстрактную математическую
модель реального (физического
) маятника. Необходимо помнить формулы для периода (или частоты) колебаний пружинного и математического маятников. Для пружинного маятника
где - длина нити, - ускорение свободного падения. Рассмотрим применение этих определений и законов на примере решения задач.
Чтобы найти циклическую частоту колебаний груза в задаче 11.1.1 найдем сначала период колебаний, а затем воспользуемся формулой (11.2). Поскольку 10 м 28 с - это 628 с, и за это время груз совершает 100 колебаний, период колебаний груза равен 6,28 с. Поэтому циклическая частота колебаний равна 1 c -1 (ответ 2 ). В задаче 11.1.2 груз за 600 с совершил 60 колебаний, поэтому частота колебаний - 0,1 с -1 (ответ 1 ).
Чтобы понять, какой путь пройдет груз за 2,5 периода (задача 11.1.3 ), проследим за его движением. Через период груз вернется назад в точку максимального отклонения, совершив полное колебание. Поэтому за это время груз пройдет расстояние, равное четырем амплитудам: до положения равновесия - одна амплитуда, от положения равновесия до точки максимального отклонения в другую сторону - вторая, назад в положение равновесия - третья, из положения равновесия в начальную точку - четвертая. За второй период груз снова пройдет четыре амплитуды, а за оставшиеся половину периода - две амплитуды. Поэтому пройденный путь равен десяти амплитудам (ответ 4 ).
Величина перемещения тела - расстояние от начальной точки до конечной. За 2,5 периода в задаче 11.1.4 тело успеет совершить два полных и половину полного колебания, т.е. окажется на максимальном отклонении, но с другой стороны от положения равновесия. Поэтому величина перемещения равна двум амплитудам (ответ 3 ).
По определению фаза колебаний - это аргумент тригонометрической функции, которой описывается зависимость координаты колеблющегося тела от времени. Поэтому правильный ответ в задаче 11.1.5 - 3 .
Период - это время полного колебания. Это значит, что возвращение тела назад в ту же точку, из которой тело начало движение, еще не означает, что прошел период: тело должно вернуться в ту же точку с той же скоростью. Например, тело, начав колебания из положения равновесия, за период успеет отклониться на максимальную величину в одну сторону, вернуться назад, отклонится на максимум в другую сторону и снова вернуться назад. Поэтому за период тело успеет два раза отклониться на максимальную величину от положения равновесия и вернуться обратно. Следовательно, на прохождение от положения равновесия до точки максимального отклонения (задача 11.1.6 ) тело затрачивает четвертую часть периода (ответ 3 ).
Гармоническими называются такие колебания, при которых зависимость координаты колеблющегося тела от времени описывается тригонометрической (синус или косинус) функцией времени. В задаче 11.1.7 таковыми являются функции и , несмотря на то, что входящие в них параметры обозначены как 2 и 2 . Функция же - тригонометрическая функция квадрата времени. Поэтому гармоническими являются колебания только величин и (ответ 4 ).
При гармонических колебаниях скорость тела изменяется по закону  , где - амплитуда колебаний скорости (начало отсчета времени выбрано так, чтобы начальная фаза колебаний равнялась бы нулю). Отсюда находим зависимость кинетической энергии тела от времени
, где - амплитуда колебаний скорости (начало отсчета времени выбрано так, чтобы начальная фаза колебаний равнялась бы нулю). Отсюда находим зависимость кинетической энергии тела от времени  (задача 11.1.8
). Используя далее известную тригонометрическую формулу, получаем
(задача 11.1.8
). Используя далее известную тригонометрическую формулу, получаем
Из этой формулы следует, что кинетическая энергия тела изменяется при гармонических колебаниях также по гармоническому закону, но с удвоенной частотой (ответ 2 ).
За соотношением между кинетической энергий груза и потенциальной энергией пружины (задача 11.1.9 ) легко проследить из следующих соображений. Когда тело отклонено на максимальную величину от положения равновесия, скорость тела равна нулю, и, следовательно, потенциальная энергия пружины больше кинетической энергии груза. Напротив, когда тело проходит положение равновесия, потенциальная энергия пружины равна нулю, и, следовательно, кинетическая энергия больше потенциальной. Поэтому между прохождением положения равновесия и максимальным отклонением кинетическая и потенциальная энергия один раз сравниваются. А поскольку за период тело четыре раза проходит от положения равновесия до максимального отклонения или обратно, то за период кинетическая энергия груза и потенциальная энергия пружины сравниваются друг с другом четыре раза (ответ 2 ).
Амплитуду колебаний скорости (задача 11.1.10
) проще всего найти по закону сохранения энергии. В точке максимального отклонения энергия колебательной системы равна потенциальной энергии пружины  , где - коэффициент жесткости пружины, - амплитуда колебаний. При прохождении положения равновесия энергия тела равна кинетической энергии
, где - коэффициент жесткости пружины, - амплитуда колебаний. При прохождении положения равновесия энергия тела равна кинетической энергии  , где - масса тела, - скорость тела при прохождении положения равновесия, которая является максимальной скоростью тела в процессе колебаний и, следовательно, представляет собой амплитуду колебаний скорости. Приравнивая эти энергии, находим
, где - масса тела, - скорость тела при прохождении положения равновесия, которая является максимальной скоростью тела в процессе колебаний и, следовательно, представляет собой амплитуду колебаний скорости. Приравнивая эти энергии, находим
(ответ 4 ).
Из формулы (11.5) заключаем (задача 11.2.2 ), что от массы математического маятника его период не зависит, а при увеличении длины в 4 раза период колебаний увеличивается в 2 раза (ответ 1 ).
Часы - это колебательный процесс, который используется для измерения интервалов времени (задача 11.2.3 ). Слова часы «спешат» означают, что период этого процесса меньше того, каким он должен быть. Поэтому для уточнения хода этих часов необходимо увеличить период процесса. Согласно формуле (11.5) для увеличения периода колебаний математического маятника необходимо увеличить его длину (ответ 3 ).
Чтобы найти амплитуду колебаний в задаче 11.2.4
, необходимо представить зависимость координаты тела от времени в виде одной тригонометрической функции. Для данной в условии функции это можно сделать с помощью введения дополнительного угла. Умножая и деля эту функцию на  и используя формулу сложения тригонометрических функций, получим
и используя формулу сложения тригонометрических функций, получим
|

где - такой угол, что  . Из этой формулы следует, что амплитуда колебаний тела -
. Из этой формулы следует, что амплитуда колебаний тела -  (ответ 4
).
(ответ 4
).
(лат. amplitude — величина) — это наибольшее отклонение колеблющегося тела от положения равновесия.
Для маятника это максимальное расстояние, на которое удаляется ша-рик от своего положения равновесия (рисунок ниже). Для колебаний с малыми амплитудами за такое расстояние можно принимать как длину дуги 01 или 02, так и длины этих отрезков.
Амплитуда колебаний измеряется в единицах длины — метрах , санти-метрах и т. д. На графике колебаний амплитуда определяется как макси-мальная (по модулю) ордината синусоидальной кривой, (см. рис. ниже).

Период колебаний.
Период колебаний — это наименьший промежуток времени, через который система, соверша-ющая колебания, снова возвращается в то же состояние, в котором она находилась в начальный момент времени, выбранный произвольно.
Другими словами, период колебаний (Т ) — это время, за которое совершается одно полное ко-лебание. Например, на рисунке ниже это время, за которое грузик маятника перемещается из крайней правой точки через точку равновесия О в крайнюю левую точку и обратно через точку О снова в крайнюю правую.

За полный период колебаний, таким образом, тело проходит путь, равный четы-рем амплитудам. Период колебаний измеряется в единицах времени — секундах , минутах и т. д. Период колебаний может быть определен по известному графику колебаний, (см. рис. ниже).
Понятие «период колебаний», строго говоря, справедливо, лишь когда значения колеблющей-ся величины точно повторяются через определенный промежуток времени, т. е. для гармоничес-ких колебаний. Однако это понятие применяется также и для случаев приблизительно повторяю-щихся величин, например, для затухающих колебаний .
Частота колебаний.
Частота колебаний — это число колебаний, совершаемых за единицу времени, например, за 1 с .
Единица частоты в СИ названа герцем (Гц ) в честь немецкого физика Г. Герца (1857-1894). Если частота колебаний (v ) равна 1 Гц , то это значит, что за каждую секунду совершается одно колебание. Частота и период колебаний связаны соотношениями:
В теории колебаний пользуются также понятием циклической , или круговой частоты ω . Она связана с обычной частотой v и периодом колебаний Т соотношениями:
 .
.
Циклическая частота — это число колебаний, совершаемых за 2π секунд.
Период.
Периодом T называется промежуток времени, в течение которого система совершает одно полное колебание:N - число полных колебаний за время t .
Частота.
Частота ν - число колебаний в единицу времени:Единица частоты - 1 герц (Гц) = 1 с -1
Циклическая частота:
Уравнение гармонического колебания:
x - смещение тела от положения. X m - амплитуда, то есть максимальное смещение, (ωt + φ 0) - фаза колебаний, Ψ 0 - его начальная фаза.
Скорость.
При φ 0 = 0:![]()
Ускорение.
При φ 0 = 0:![]()
Свободные колебания.
Свободными называются колебания, возникающие в механической системе (осцилляторе) при единичном отклонении её от положения равновесия, имеющие собственную частоту ω 0 , задаваемую только параметрами системы, и затухающие со временем из-за наличия трения.Математический маятник.
Частота:
l - длина маятника, g - ускорение свободного падения.

Максимальную кинетическую энергию маятник имеет в момент прохождения положения равновесия:

Пружинный маятник.
Частота:
k - жёсткость пружины, m - масса груза.

Максимальную потенциальную энергию маятник имеет при максимальном смещении:

Вынужденные колебания.
Вынужденными называют колебания, возникающие в колебательной системе (осцилляторе) под действием периодически меняющейся внешней силы.Резонанс.
Резонанс - резкое увеличение амплитуды X m вынужденных колебаний при совпадении частоты ω вынуждающей силы с частотой ω 0 собственных колебаний системы.Волны.
Волны - это колебания вещества (механические) или поля (электромагнитные), распространяющиеся в пространстве с течением времени.Скорость волны.
Скорость распространения волны υ - скорость передачи энергии колебания. При этом частицы среды колеблются около положения равновесия, а не движутся с волной.Длина волны.
Длина волны λ - расстояние, на которое распространяется колебание за один период:Единица длины волны - 1 метр (м).
Частота волны:
Единица частоты волны - 1 герц(Гц).
>>Физика: Механические колебания
Колебания являются очень распространенным видом движения. Это покачивание веток деревьев на ветру, вибрация струн у музыкальных инструментов, движение поршня в цилиндре двигателя автомобиля, качания маятника в настенных часах и даже биения нашего сердца.
Сегодняшняя тема урока будет посвящена изучению колебания и колебательных движений.
Процесс колебания является самым распространенным видом движения, которые существуют в природе. А если мы этот процесс будем рассматривать с точки зрения механических движений, то колебания можно назвать самым распространенным видом механического движения.
Под таким понятием, как колебание, принято считать такое движение, которое повторяется полностью или частично с течением времени.
Как вы думаете, являются ли колебательными движениями качание деревьев или шевеление листвы под воздействием ветра? Естественно такое движение можно отнести к колебаниям. Также колебательные движения выполняют качающиеся качели, вибрирующие струны музыкальных инструментов и качание маятника в часах. И даже любое движение человеческого тела и наше сердцебиение, которое повторяется на протяжении времени, также выполняет колебательные движения.
Ну что ж, теперь мы можем сделать вывод и дать определение этому явлению.
Процесс, который повторяется с течением времени, называется колебанием.
Условия, необходимые для колебаний
Теперь давайте с вами на примерах пружинного и нитяного маятников более подробно рассмотрим процесс колебательных движений.
А сейчас давайте обратим внимание на наши рисунки, на которых изображены данные маятники.
На первом рисунке нам представлен, так званый нитяной маятник, этот маятник еще называют математическим. Теперь рассмотрим, что собой представляет этот математический маятник. А представляет он некое массивное тело, в данном случае шарик, который подвешен на длинную и тонкую нить. Если мы попробуем взять и сместить его в сторону, нарушив его равновесие, а потом отпустим, то этот шарик будет выполнять повторяющиеся движения в стороны, и при этом он периодически будет проходить через положение равновесия. В этом случае, можно сказать, что данный шарик начнет выполнять колебательные движения, то есть колебаться.
Теперь рассмотрим следующий рисунок, на котором изображен пружинный маятник. Это маятник представлен в виде грузика, который закреплен на пружине и под действием силы упругости этой пружины, способен выполнять колебательные движения.
Но, как вы уже видите с приведенных примеров, что для осуществления колебаний необходимы некоторые условия.
Для существования колебаний необходимо:
Во-первых, наличие самой колебательной системы. А в нашем случае, такой системой являются данные маятники, которые способны осуществить эти колебательные движения.
Во-вторых, необходимо иметь точку равновесия и притом равновесия устойчивого.
В-третьих, обязательное наличие запасов энергии, с помощью которой и будут осуществляться колебательные движения.
И, в-четвертых, наличие небольшой силы трения, так как если сила трения будет большой, то, естественно, что ни о каких колебаниях не может идти никакой речи.
Единицы измерения амплитуды колебаний
Величинами, которые характеризуют колебательные движения, являются:
1. Амплитуда, которую обозначают символом «А» и измеряют в таких единицах длины, как метры, сантиметры и т.д. Как правило, амплитудой принято считать максимальное расстояние, на которое колеблется тело от своего положения равновесия.
2. Период, который обозначают символом «Т» и измеряют в единицах времени, то есть в минутах, секундах и т.д. Период является тем временем, за которое происходит одно колебание.
3.Частота, которую обозначают символом «V». Частотой колебаний принято считать то количество колебаний, которое осуществляется за 1 с.
В системе СИ единицу частоты принято называть «герцем». Свое название она получила в честь немецкого физика Г. Герца.
Если припустим, частота колебаний будет равна 1 Гц, то это будет значить, что одно колебание совершается за одну секунду. В случае, если частота будет равняться v = 50 Гц, то естественно, что за каждую секунду будут совершено 50 колебаний.
Формулы амплитуды колебаний
А теперь давайте перейдем к рассмотрению формул колебаний. Здесь следует отметить, что для периода Т и частоты v колебаний правильными будут те же формулы, которые используют и для периода и частоты обращения.
Рассмотрим значения этих формул более подробно:
1. Во-первых, для того чтобы найти период колебаний, нам необходимо взять время t, за которое было совершено какое-то количество колебаний и разделить на n, которое является числом этих колебаний и получим такую формулу:
2. Во-вторых, если нам необходимо найти частоту колебаний, то нужно взять число колебаний и разделить их на время, в течение которого эти колебания происходили. В итоге, у нас получилась такая формула:
Но чтобы лучше понять, как производить подсчет числа колебаний, необходимо иметь представление того, что такое одно полное колебание. Для этого опять вернемся к рассмотрению рис. 30, где нам наглядно показано, что маятник начинает свое движение из положения 1, дальше он проходит положение равновесия и переходит в положение 2, а дальше он возвращается из второго положения в положение равновесия и снова возвращается в положение 1. Вот этот весь процесс и является одним колебанием.
Стоит обратить внимание на то, что при сравнении этих двух формул период и частота колебаний, являются величинами взаимно обратными, т. е.
График колебаний
Как вам уже известно, из сегодняшнего урока, что положение тела в процессе колебания непрерывно меняется.
Графиком колебаний называют такой график зависимости, где координаты колеблющегося тела зависят от времени.
А теперь давайте рассмотрим, что собой представляет график колебаний. Для этого мы возьмем и по горизонтальной оси нашего графика отложим время t, а координату х разместим на вертикальной оси. Теперь, с помощью модуля, этой координаты мы видим на каком расстоянии от первоначального положения, то есть положения равновесия, находится колеблющееся тело на данный момент времени.
А, когда данное тело переходит через положение равновесия, то в этом случае знак координаты измениться на противоположный. То есть, этот знак нам показывает, что тело переместилось на другую сторону от положения равновесия.
Практическая работа
А теперь давайте проведем несколько интересных опытов. Для этого пружинный маятник попробуем соединить с пишущим устройством. А дальше начнем равномерно перемещать бумажную ленту перед этим колеблющимся телом. Если вы внимательно посмотрите на рис 32, то увидите, как с помощью кисточки на ленте появляется линия, которая будет совпадать с графиком колебаний.
На рисунке 33 изображена установка нитяного маятника, где также можно записать колебания этого маятника. В данном примере маятником здесь служит воронка с песком. Мы точно также помещаем бумажную ленту под колеблющейся воронкой и наблюдаем, как песок, который сыпется из воронки, оставляет соответствующий след.

Теперь мы видим, что на протяжении незначительных интервалов и при довольно таки малом трении, графиком колебаний этих маятников является синусоида.

Так, например, на графике нам видны все колебательные движения, где A = 5 см, Т = 4 с и v= 1/T = 0,25 Гц.









